Roboter-Simulator
Dies ist eine kurze Anleitung zum Haskell-Roboter-Simulator, der
auf dem Blatt 9 erwähnt wird und auch in der Vorlesung kurz
gezeigt wurde. Auf den SUN- und FreeBSD-Maschinen des WSI ist der
Simulator bereits installiert. Damit Hugs die Bibliotheken des
Simulators auch findet, muss man allerdings noch eine Kleinigkeit
tun.
Den Simulator starten
Hugs sollte auf den SUN-Rechnern mit diesen Parametern gestartet
werden:
hugs -h8192k -P/afs/wsi/pu/fp-2003/lib/hugs/sun4x_58/x11:
Auf den FreeBSD-Rechnern sieht der Aufruf so aus:
hugs -h8192k -P/afs/wsi/pu/fp-2003/lib/hugs/i386_fbsd46/x11:
Nun kann mit :load Robot der Simulator geladen
werden. Ein Program das den Simulator verwendet kann mit
import Robot das entsprechende Modul öffnen.
Simulatoren
Das Modul Robot beinhaltet drei verschiedene Simulatoren, die sich
jedoch alle nur in ihrer Implementierung unterscheiden. Das
heisst, die Roboter sollten sich in allen Varianten des Simulators
gleich verhalten. Die Simulatoren unterscheiden sich nur
hinsichtlich der Methode, wie das Fenster neu gezeichnet wird.
Dadurch ergeben sich unterschiedliche Ablaufgeschwindigkeiten.
Die Simulatoren werden mit den Funktionen runRobot,
runInvisibleRobot und runT3Arnie
gestartet. runRobot startet den langsamen Simulator, der
aber immer alles korrekt neu zeichnet, runT3Arnie
kümmert sich nicht sonderlich um diese Thematik und ist
deshalb sehr viel schneller. Startet man den Simulator mit
runInvisibleRobot, so ist der Roboter unsichtbar und
extrem schnell.
Simulation starten
Die Funktionen runRobot, runT3Arnie und
runInvisibleRobot nehmen einen Roboter Robot ()
als Argument und setzen ihn einer leeren Welt aus. Diese
Funktionen sind vom Typ runRobot,runT3Arnie,runInvisibleRobot
:: Robot () -> IO ().
In diesem Beispiel wird ein Roboter, der sich gelegentlich in eine
zufällige Richtung dreht, losgelassen:
[knauel@orionis fp-09] hugs -h8192k -P/afs/wsi/pu/fp-2003/lib/hugs/sun4x_58/x11:
[ ... Hugs Meldungen ...]
Prelude> :load Robot
[ ... noch mehr Hugs Meldungen ...]
Robot> runT3Arnie randomRobot
Der Simulator öffnet nun ein Fenster und wartet darauf das der
Benutzer die Leertaste drückt, um die Simulation zu starten.
Bei den erwähnten drei Simulatoren ist die Welt immer leer
und der Roboter wird in der Mitte des Welt ausgesetzt.
Simulation mit Labyrinth
Neben den erwähnten drei Simulatoren gibt es noch Simulaoren, die
den Roboter in einem Labyrinth aussetzen. Auch hier stehen wieder
drei Varianten zur Verfügung: runRobotInMaze,
runT3ArnieInMaze und
runInvisibleRobotInMaze. Diese Funktionen haben die
Signaturen
runRobotInMaze,runT3ArnieInMaze,runInvisibleRobotInMaze ::
Robot () -> IO().
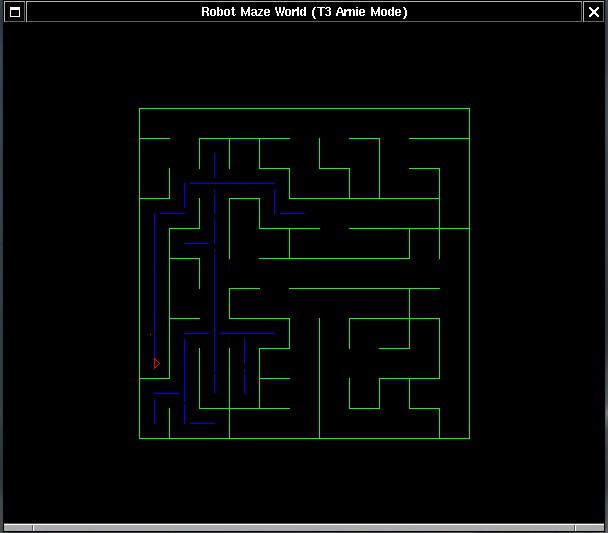
Bei jedem Start der Simulatoren wird ein neues zufälliges
Labyrinth erzeugt und der Roboter in der linken unteren Ecke
plaziert. Wie auf dem Aufgabenblatt beschrieben soll der Roboter
nun einen Weg durch das Labyrinth finden, sich also in die rechte
obere Ecke bewegen. Die Labyrinthe werden gerade so erzeugt, das
es diesen Weg immer gibt.
Das Bild oben auf dieser Seite wurde gerade mit diesem Aufruf
erzeugt und zeigt einen verwirrt (weil zufällig) in der Gegend
umherlaufenden Roboter:
[knauel@orionis fp-09] hugs -h8192k -P/afs/wsi/pu/fp-2003/lib/hugs/sun4x_58/x11:
[ ... Hugs Meldungen ...]
Prelude> :load Robot
[ ... noch mehr Hugs Meldungen ...]
Robot> runT3ArnieInMaze randomRobot2
Hinweis für coole Hacker: Die Simulatoren sorgen dafür,
dass der Roboter nach dem Start 100 Goldstücke bei sich
hat. Vielleicht kann man (muss man aber nicht) diese Tatsache
nutzen, um schneller einen Weg durch das Labyrinth zu finden?
Die Simulatoren aus dem XEmacs starten
Um die Simulatoren direkt aus dem XEmacs heraus zu starten, sind
kleine Anpassungen an der ~/.xemacs/init.el
bzw. ~/.emacs notwendig. Dort ist der folgende Eintrag
vorzunehmen, bzw. der schon bestehende Eintrag für den
Haskell-Mode durch diesen hier zu ersetzen:
Der Text zum Download.
;; Haskell mode
;; ############
(setq load-path (cons "/afs/informatik.uni-tuebingen.de/pu/fp-2003/lib/lisp" load-path))
(defun my-haskell-constants ()
(let ((systype (getenv "SYSTYPE"))
(std-switches '("+." "-h4096k"))
(fp2003-lib-path "/afs/wsi/pu/fp-2003/lib/hugs"))
(if (not (and systype
(member systype
'("i386_fbsd46" "sun4x_58" "ppc_macx66"))))
(progn
(setq haskell-prog-switches std-switches)
(message
(concat "Could not determine SYSTYPE / unsupported SYSTYPE. "
"Will not load Hugs Graphics library")))
(setq haskell-prog-switches
(cons (concat "-P" fp2003-lib-path "/" systype "/x11:") std-switches))))
(setq haskell-prog-name (executable-find "hugs")
haskell-use-left-delim ""
haskell-use-right-delim ""
comint-prompt-pattern "^[A-Za-z0-9\-_]+> ")
(set-face-background haskell-indentation-face
(make-color-specifier "yellow"))
(set-face-background haskell-indentation-face-2
(make-color-specifier "yellow"))
(define-key haskell-mode-map [delete] 'delete-char))
(add-hook 'haskell-mode-hook 'my-haskell-constants)
(setq auto-mode-alist
(cons '("\\.hs$" . haskell-mode)
(cons '("\\.lhs$" . haskell-mode)
auto-mode-alist)))
(autoload 'haskell-mode "haskell-mode" "Major mode for editing Haskell." t)
Eric Knauel
Last modified: Thu Jul 10 09:50:31 CEST 2003